
9/18收到一份大里高中公文
內容是「不限平台智慧循跡車競賽」


仔細看了一下活動計劃書








國小前25隊報名的隊伍
每隊送一台mBot教具組
加上獲獎隊伍都有優渥的獎金
讓人看了非常心動

為了搶奪先機
我立馬找602何昌融、賴雨瑤、羅予彤3人組隊參賽
一來「太陽能科學創意玩具競賽」彼此有合作的經驗
二來他們三人過去也是程式遊戲社的學生
多多少少有寫程式的基礎
當報名結果公告時
我們排序第12
順利獲得一組mBot教具組




10/15指導教師增能研習領取mBot教具組後
當天中午我就請三名學生到會議室進行組裝




除了主辦單位配發的mBot外
我也跟齊志恆老師及賴明珠老師各借一台mBot
到時看哪台mBot車況最佳
比賽時就用那台mBot上場

至於賽道圖部分
智樂教育中心可直接購買
一張賽道圖2800元

雖然我有詢問別的印刷廠商
一張不必到2800元那麼貴
但為了避免重蹈去年BrainGo賽道圖感應不靈敏的覆轍
這次寧可多花點錢
買一張和正式比賽一模一樣的賽道圖
這樣校內練習時才不會白做工
原先賽道圖規劃放在會議室
但想說那裡常會人來人往
後來決定改放在電腦教室二後方地板
四周用三角錐及交通桿圍起來


因為學生和我都沒有太多mBot撰寫程式的經驗
所以我們只能上網查詢相關資料

#精讚連結


mBot超音波感測器分為左右
回傳的值為0~3

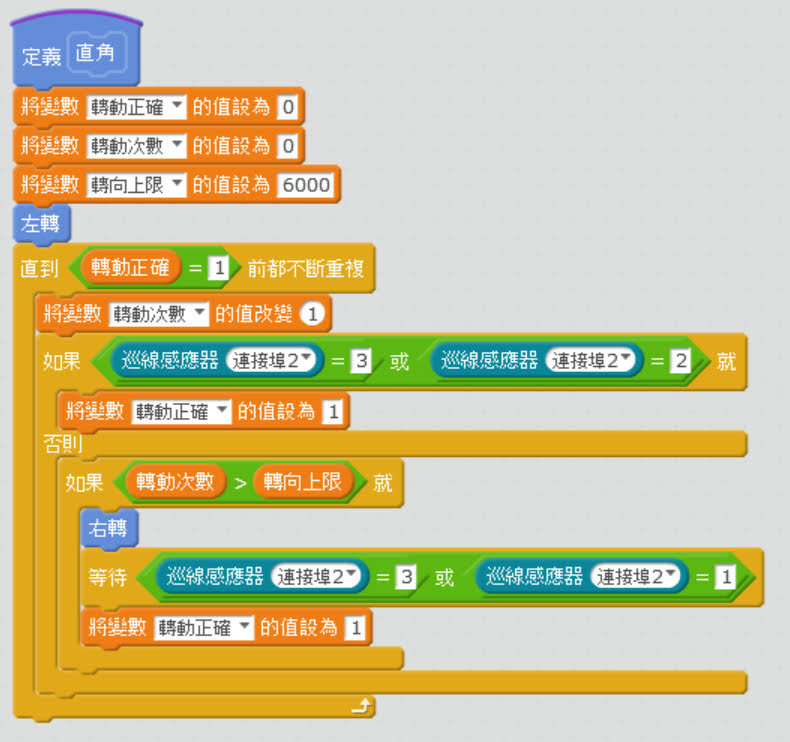
起初我們先用mBlock 5來撰寫程式
使用變數(搭配蜂鳴音)控制mBot遇到直角右轉或左轉
在避障點前測試都很正常
後來發現加入避障程式後
mBot反而變成無法正常運作
我只好改用mBlock 3來撰寫程式

雖然採用直角變數累加有機會可以順利抵達終點

但這種作法還是會有風險
在最後急彎的地方常常會多偵測一次或是少偵測一次
這樣mBot就沒辦法每次都精準的停在終點

後來跟齊志恆老師討論
他說要另外購買mBot ICCI-CNY70才會比較有勝算

不過因為時間緊迫
一來不知道要去哪購買
二來網路上也找不太到ICCI-CNY70的教學資源
最後我想出一個變通方法
把兩台mBot自走車的紅外線感測器裝在同一台車上
這樣有兩組紅外線感測器就可做更多的判斷



不過測試的過程也是一波三折
中途還一度想放棄這個作法

正當絕望到極點時突然靈光一現
想說我以左側紅外線感測器當主體
右側紅外線感測器當輔助
並參考網路上擺頭偵測左右轉的程式積木

並在賽道圖上標示出遇到四白的狀況

最後和齊志恆老師討論後終於把程式修改完成





看到mBot能順利抵達終真的超級感動
雖然我們的車速不快
但只要能取得滿分
順利停在終點區內
獲獎機會就大大提升
11/7一早我開車載學生至大里高中報到






學生穿著綠色背心進入賽場


指導老師只能在二樓看台觀賽

國小組有分A、B兩場地


開幕式結束後比賽正式開始

各隊學生先檢查自走車狀況

沒問題便要繳交自走車做檢錄

第一次試跑撞倒避障物只獲得60分
三位學生趕緊改寫程式
讓mBot繞過避障物的弧度能較大些


第二次試跑到達終點突然mBot又轉向出來
只獲得90分
相當可惜
時間大約花了1分13秒
和在學校測試時差不多
現場有看到其他隊伍僅花了不到30秒就抵達終點
超級厲害
主辦單位統計成績時
指導老師終於可進場
我們趕緊到舞台前拍照留念

雨瑤爸爸今天也有到場觀賽
他還特地買飲料請大家


主辦單位也有替各隊指導老師及選手準備餐盒

成績公布時我們獲得佳作
排序第七
差個名次就可晉級優勝


佳作有500元的獎金可以領取


學生拿到獎金笑得合不攏嘴

我也在Facebook上分享這份喜訊

11/23收到主辦單位寄送「市級」的獎狀
真有些小驚喜

12/3學生朝會時也公開進行頒獎
602還替這三位選手大聲歡呼
可說是602之光


沒有留言:
張貼留言
注意:只有此網誌的成員可以留言。